/img/star (2).png.webp)


/img/news (2).png.webp)
/img/event.png.webp)
Время прочтения: 7 мин.
Применение современного аппарата искусственных нейронных сетей в различных технических системах способствует повышению эффективности их функционирования. Рассмотрю это на примере организации движения транспортных средств. Была поставлена задача разработать интеллектуальную систему управления светофорами, которая позволит управлять транспортными потоками на основе данных о загрузке направлений перекрестка и дорог, выходящих с соседних перекрестков.
Для решения этой задачи используется алгоритм, который предполагает реализацию принципа декомпозиции выработки решений. Он считается общепринятым для сетевых адаптивных методов управления.
В основе декомпозиции управления лежит разбиение района города на взаимно пересекающиеся дороги.
Центром каждой зоны является регулируемый перекресток, а рассматриваемая часть охватывает все перекрестки, смежные с центральным.
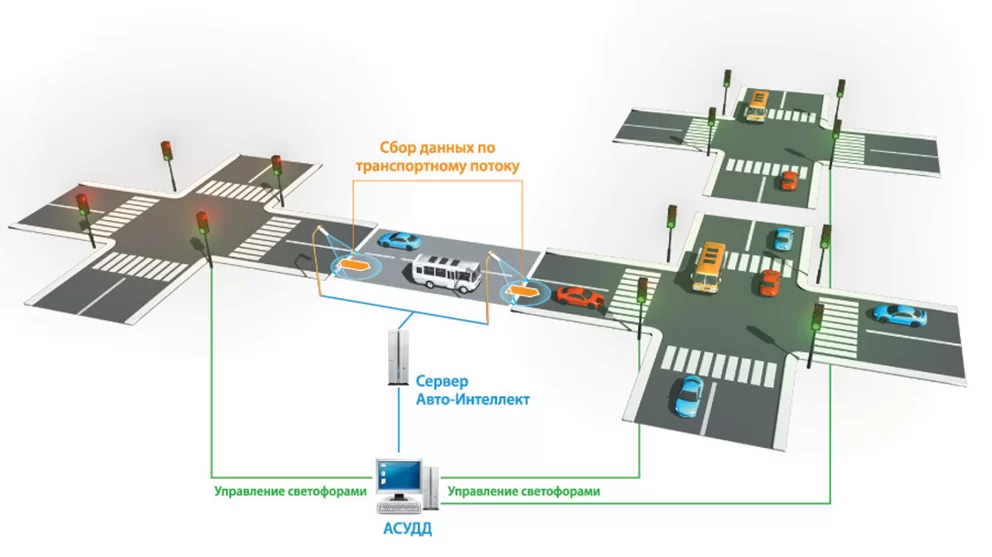
Система управления светофорами состоит из управляющего центра, который функционирует посредством интеллектуального дорожного контроллера. Управление светофорными циклами может осуществляться жестко (постоянно по времени независимо от интенсивности движения), а также адаптивно (принимаемые решения зависят от интенсивности движения).
Также в систему управления дорожным движением входит оборудование, предназначенное для переключения сигналов светофоров и символов многопозиционных дорожных знаков, и указателей скорости как на локальном перекрестке, так и на перекрестке, входящим в систему координированного управления дорожным движением.
Разгрузка дорожного движения в наблюдаемой зоне выполняется с помощью регулирования светофорами, что позволяет изменить время ожидания транспортного потока и, соответственно, уменьшить транспортную нагрузку.
Аналогичные задачи рассматриваются в теории массового обслуживания, поэтому был выбран критерий Level of Service. Характеристики этого критерия изменяются как заданная функция отношения интенсивности движения к пропускной способности обслуживающей транспортной структуры.
Критерий Level of Service необходим для оценки условий движения транспортных средств, в том числе как показатель загрузки дороги транспортным потоком.
Одним из главных параметров, характеризующих движение на улично-дорожной сети, является интенсивность движения транспортных средств в потоке. При этом интенсивность движения на регулируемом участке дорожной сети можно разделить на две составляющие: интенсивность прибытия транспортных средств на подходе к участку дорожной сети и интенсивность убывания очереди транспортных средств после включения разрешающего сигнала светофора.
Интенсивность движения прибытия и интенсивность убывания используются для вычисления среднего значения задержки движения транспортных средств.
Средняя задержка характеризует качество обслуживания отдельно взятого транспортного средства. Точность расчета среднего значения задержки движения транспортных средств в потоке имеет принципиальное значение, так как на ее основе оценивается длина очередей и определяется суммарная задержка.
Большинство современных систем управления светофором работают по заданным алгоритмам, временным интервалам, из-за этого система не в состоянии справиться с изменяющейся ситуацией на дороге. Перспективным решением этой проблемы является оптимизация системы с помощью искусственных нейронных сетей. Их преимущество заключается в возможности самообучения, что позволяет оптимизировать систему под изменяющуюся ситуацию на дороге.
Таким образом, реализована система управления автоматической адаптации к изменяющимся условиям движения, например, при проведении ремонтных работ, по временам года и т. д.
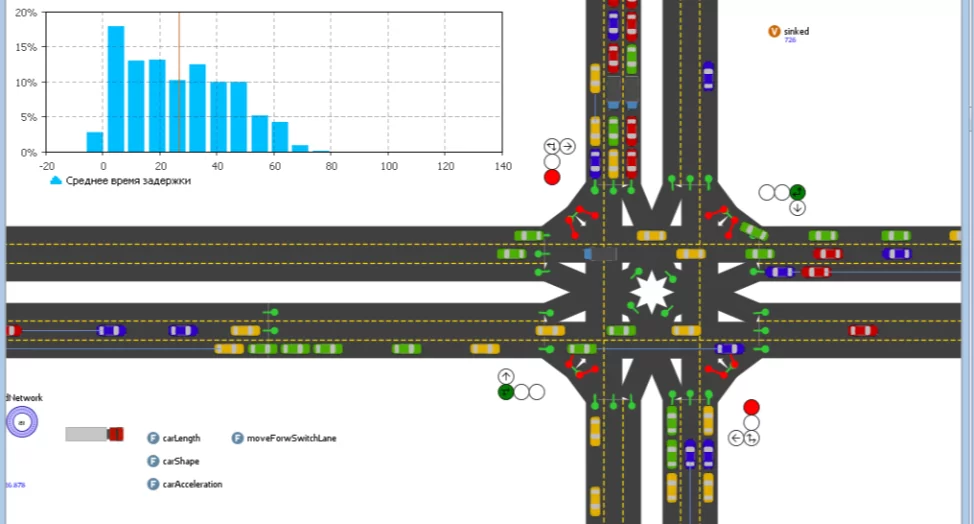
Была разработана имитационная модель в Anylogic (https://www.anylogic.ru/) с помощью библиотеки Road Traffic Library, которая включает следующие структурные элементы (Рисунок 1):
- четырехстороннее пересечение с примыкающими с каждой стороны дорогами;
- разделительная полоса на каждой дороге, делящая ее на две проезжие части по три полосы в каждом направлении;
- система генерации агентов модели – транспортных средств двух типов: легковой автомобиль и грузовой автомобиль грузоподъемностью от 2 до 6 тонн;
- четыре блока логики движения транспортных средств (по одному на каждое направление);
- модели элементов световой сигнализации – светофоры;
- диаграмма состояний, моделирующая логику переключения сигналов светофоров, основанную на двухкольцевой фазировке.
Входными параметрами этой модели являются:
- интенсивность прибытия транспортных средств с северного IN, восточного IE, южного IS и западного IW подходов, авт./мин.;
- распределение автомобилей по направлениям (налево, прямо, направо) для каждого подхода, %:
- для северного подхода – pNлев., pNпрям, pNправ.;
- для восточного подхода – pEлев., pEпрям., pEправ.;
- для южного подхода – pSлев., pSпрям., pSправ.;
- для западного подхода – pWлев., pWпрям., pWправ.
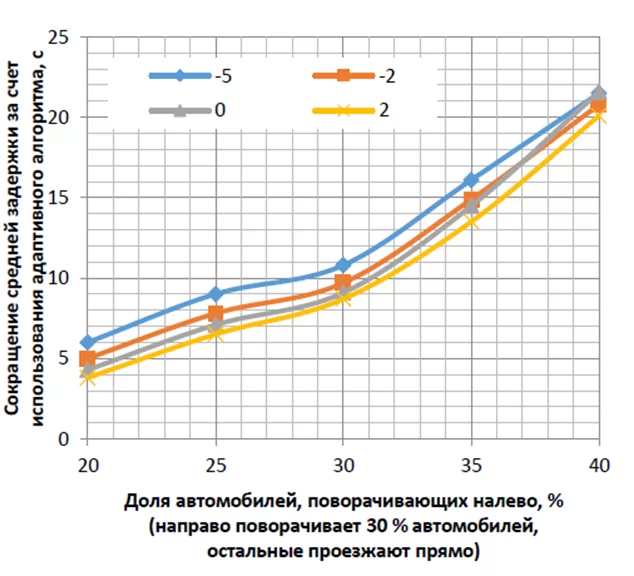
На рисунке 2 продемонстрировано сокращение средней задержки за счет использование критерия Level of Service:
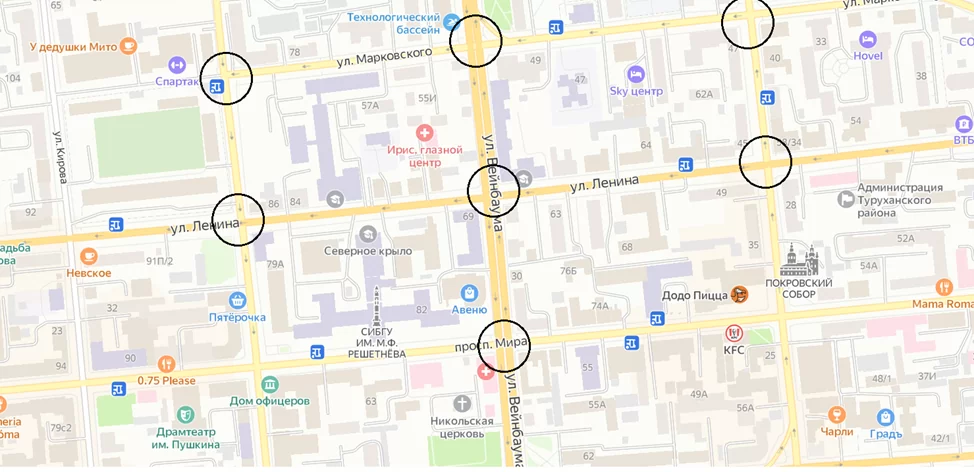
Рассмотрю конкретную часть перекрестка для дальнейшей работы (рисунок 3).
Полный цикл функционирования светофорной системы на перекрестке состоит из четырех этапов. Каждый этап включает в себя одновременную работу нескольких светофоров, объединенных в группы, которым в соответствии с порядком включения присваивается число от 1 до 4. За этап принимается период времени от включения зеленого сигнала светофора в одной группе светофоров, пока не загорится зеленый сигнал в следующей группе светофоров. На рисунке 2 цифры в кружках обозначают принадлежность светофора к группе, цифры в квадратах нумеруют полосы, по которым прибывают автомобили.
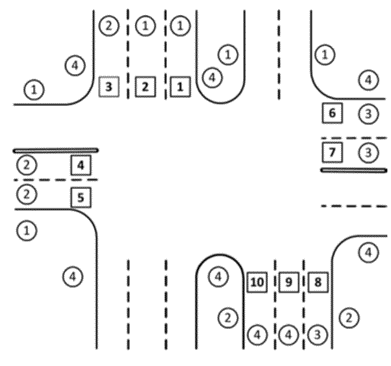
В предлагаемом алгоритме управления перекрестком последовательность включения светофоров не фиксирована. Например, третья группа может быть включена после первой группы, что обеспечивает гибкое управление перекрестком.
Существует проблема – неоднократное игнорирование отдельной группы светофоров. В результате чего автомобили, припаркованные на полосах, принадлежащих этой группе, не могут проехать перекресток, а пешеходы не могут перейти дорогу. Для этого в алгоритм введено ограничение времени простоя – 250 секунд. Если время ожидания на какой-либо группе светофоров достигло предельного значения, эта группа включается следующей.
Цикл работы выглядит следующим образом:
- 1 этап. Горит желтый сигнал (1), не мигая, ровно 3 секунды. Затем загорается красный сигнал.
- 2 этап. По истечении 3с загорается зеленый (2). Горит зеленый сигнал (2) светофора. Время работы зависит от количества машин, стоящих в потоке. Следующей для активации выбирается группа с наибольшим количеством автомобилей в полосах, если время простоя любой из групп не превышает предельного значения. В противном случае, выбирается группа с наибольшим временем ожидания. Светофор загорается для выбранной группы.
- 3 этап. Загорается желтый сигнал (3) на текущей группе светофоров. Желтый сигнал (3) горит и мигает 3 секунды.
- 4 этап. По истечении 3с загорается красный сигнал (4). Во время работы красного сигнала светофор находится в дежурном режиме до включения желтого сигнала (1).
Далее рассмотрю алгоритм, реализующий функционирование системы управления светофорами на основе нейронных сетей.
Входной слой состоит из девяти входных сигналов. За входным слоем следует скрытый слой, состоящий из 100 нейронов. Далее идет выходной слой, который состоит из двух нейронов. Один из них указывает номер группы светофора, которая будет активирована следующей. Другой нейрон указывает продолжительность зеленого сигнала светофора. Входные сигналы, распространяющиеся по соответствующим связям, умножаются на весовые коэффициенты этих связей и суммируются на входе в нейрон скрытого слоя.
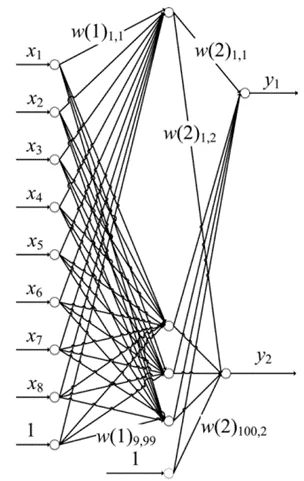
- x1 — x4 – максимальное количество машин в соответствующей группе;
- х5 — х8 – счетчики времени ожидания соответствующей группы, то есть время нахождения группы в состоянии желтого и красного сигналов;
- x9 – одиночный сигнал (в случае зеленого сигнала счетчик ожидания в этой группе обнуляется).
Главным минусом этой системы является то, что не выполнено исследование по оценки эффективности данной системы при работе в различных условиях (разные типы городов, типы траффика, климатические условия и т.п.).
На основе данных, полученных в результате наблюдения за реальным перекрестком, были выбраны параметры нейронной сети: определены архитектура, количество нейронов промежуточного слоя. Нейронная сеть, управляющая светофорами перекрестка, обучалась с использованием алгоритма обратного распространения ошибки. Корректирование максимального времени работы зеленого сигнала светофора показало, что число средней задержки движения транспортных средств в потоке может уменьшиться на 0,5–2 с при уменьшении длительности зеленого сигнала на 2–5 с. Полученный результат продемонстрировал, что нейронные сети эффективно управляют транспортными потоками в городских условиях.