/img/star (2).png.webp)



/img/news (2).png.webp)
/img/event.png.webp)

Время прочтения: 4 мин.
Применение искусственного интеллекта (далее – ИИ) проникает во все сферы деятельности человека, а также связанные с ними услуги и устройства. Назрела необходимость применения алгоритмов ИИ при обслуживании клиентов на устройствах самообслуживания (далее – УС).
Алгоритмы ИИ могут применяться на УС прежде всего для защиты клиентов от финансовых мошенничеств, в том числе с использованием методов социальной инженерии.
Так, известные схемы мошенничеств предполагают звонок по телефону потенциальной жертве, убеждение клиента пройти к УС, и под диктовку мошенника по телефону совершить определенные действия на банкомате (перевести денежные средства на счет мошенника, снять наличные, переподключить услугу мобильный банк на номер телефона мошенника, и т.д.).
Какими алгоритмами ИИ можно воспользоваться для предотвращения подобных мошеннических схем на УС? Это могут быть алгоритмы компьютерного зрения, позволяющие сканировать с камер УС внешность клиента и анализировать его поведение. Если клиент во время обслуживания на УС общается с третьими лицами по телефону, то возможным решением может быть блокировка его транзакций на УС с выводом сообщения на экран монитора о необходимости перезвонить в Контактный центр банка-эмитента.
Впервые банкомат с искусственным интеллектом, который реализует алгоритм автоматического прерывания транзакции, если клиент в момент совершения операции разговаривает по телефону, был разработан японской компанией Hitachi-Omron Terminal Solutions в 2018 году. Информация о банкомате по ссылке: https://tass.ru/obschestvo/5756911.
В нашей статье мы приводим один из возможных кодов для первоначальной идентификации клиентов, с поднятой к уху рукой в момент проведения операций на УС: Для разработки проекта была использована библиотека PoseNet, которая находится в открытом доступе по ссылке: https://github.com/rwightman/posenet-pytorch.
# подключим библиотеки
import torch
import cv2
import numpy as np
import posenet as pn
from typing import Tuple, Optional
def main():
# загрузим модель
estimator = pn.load_model(101)
stride = estimator.output_stride
# подготовим вебкамеру
webcam = cv2.VideoCapture(0)
webcam.set(3, 320)
webcam.set(4, 240)
while True:
# получим кадр
image, to_show, scale = pn.read_cap(
webcam, scale_factor=0.7125, output_stride=stride)
with torch.no_grad():
image = torch.Tensor(image)
# запустим распознование скелета
heatmap, offset, displacement_forward, displacement_backward = estimator(image)
scores_p, scores_k, coords = pn.decode_multiple_poses(
heatmap.squeeze(0), offset.squeeze(0),
displacement_forward.squeeze(0), displacement_backward.squeeze(0),
output_stride=stride, max_pose_detections=1, min_pose_score=0.15)
coords *= scale
# вычислим и отобразим положение головы человека
head_pos = get_head_position(scores_k[0], coords[0])
overlay = cv2.circle(to_show,
(int(head_pos[0]), int(head_pos[1])),
5, color=(255, 0, 0), thickness=-1)
# рассчитаем минимальное расстояние от головы до руки
min_distance = 1000
for left in [True, False]:
hand_pos = get_hand_pos(scores_k[0], coords[0], left)
if hand_pos is not None:
overlay = cv2.circle(to_show,
(int(hand_pos[0]), int(hand_pos[1])),
5, color=(0, 255, 0), thickness=-1)
dist = distance(head_pos, hand_pos)
if dist < min_distance:
min_distance = dist
# если расстояние не велико, значит человек разговаривает по телефону
if min_distance < 120:
overlay = cv2.putText(overlay, "PHONE DETECTED", (20, 30),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 3)
cv2.imshow('posenet', overlay)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
def get_head_position(scores: np.ndarray, coords: np.ndarray) -> Tuple[float, float]:
"""
Функция для получения положения головы
"""
px, py, count = 0.0, 0.0, 0
for i in range(5):
if scores[i] > 0.5:
px += coords[i][1]
py += coords[i][0]
count += 1
return px / count, py / count
def get_hand_pos(scores: np.ndarray, coords: np.ndarray, left: bool) -> Optional[Tuple[float, float]]:
"""
Функция для получения положения руки
:param left: Левая рука или правая
"""
index = 9 if left else 10
if scores[index] < 0.5:
return None
return coords[index][1], coords[index][0]
def distance(pos1: Tuple[float, float], pos2: Tuple[float, float]) -> float:
"""
Функция для вычисления расстояния между двумя координатами
"""
(x1, y1), (x2, y2) = pos1, pos2
dx, dy = x1 - x2, y1 - y2
return np.sqrt(dx * dx + dy * dy)
if __name__ == "__main__":
main()
Пример работы приведённого выше кода:
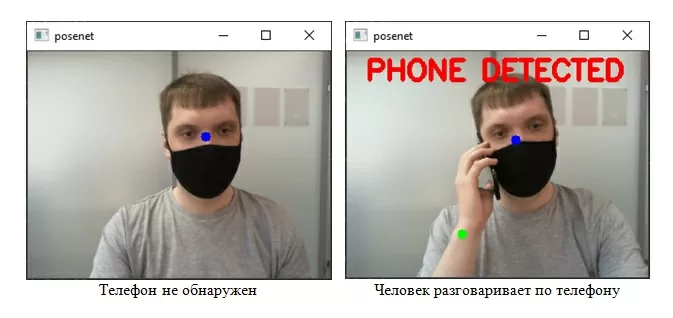
В статье приведен код, который пока определяет клиентов с поднятой к уху рукой, но может использоваться для дальнейшей обучающей модели по распознаванию самого телефона в ладони клиента.